ros2使用launch动态传参

头文件
首先ROS2launch使用Python编写
必要的头文件
1 | import os |
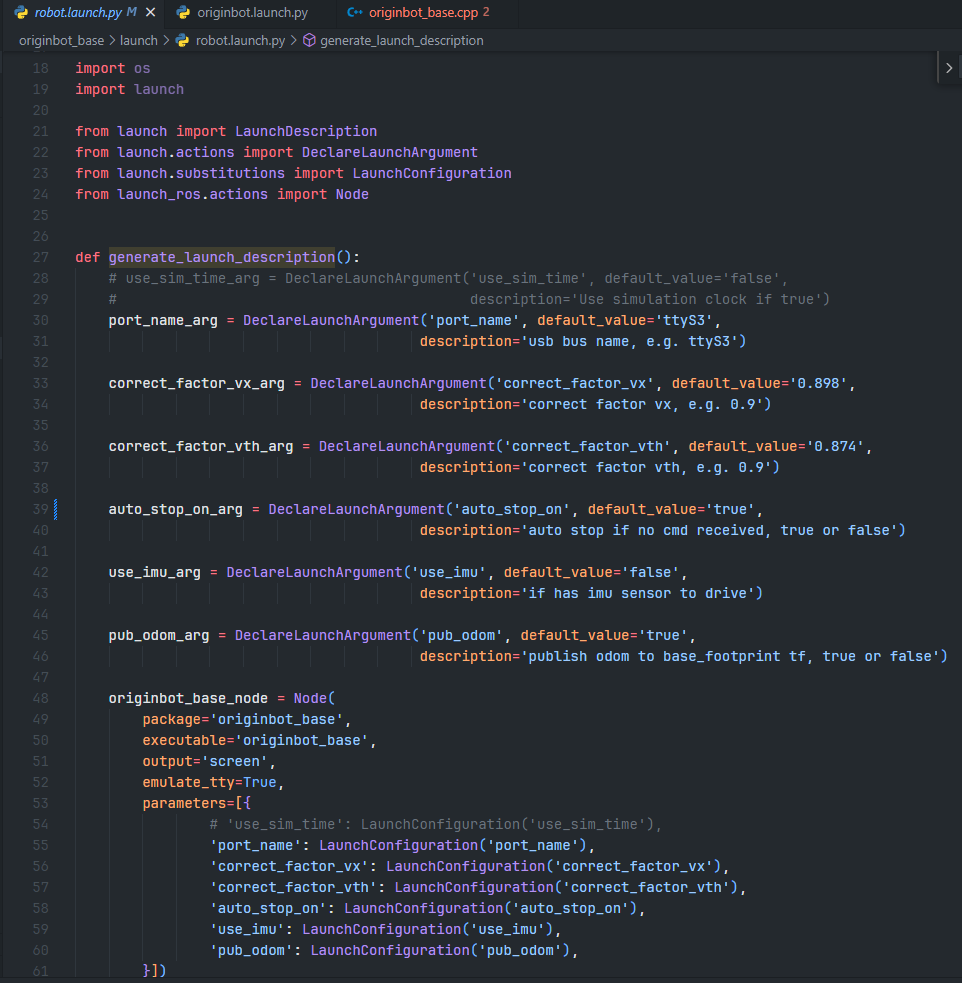
launch参数
1 | def generate_launch_description(): |
加上参数服务器传参
1 | def generate_launch_description(): |
return这些参数和执行文件
1 | def generate_launch_description(): |
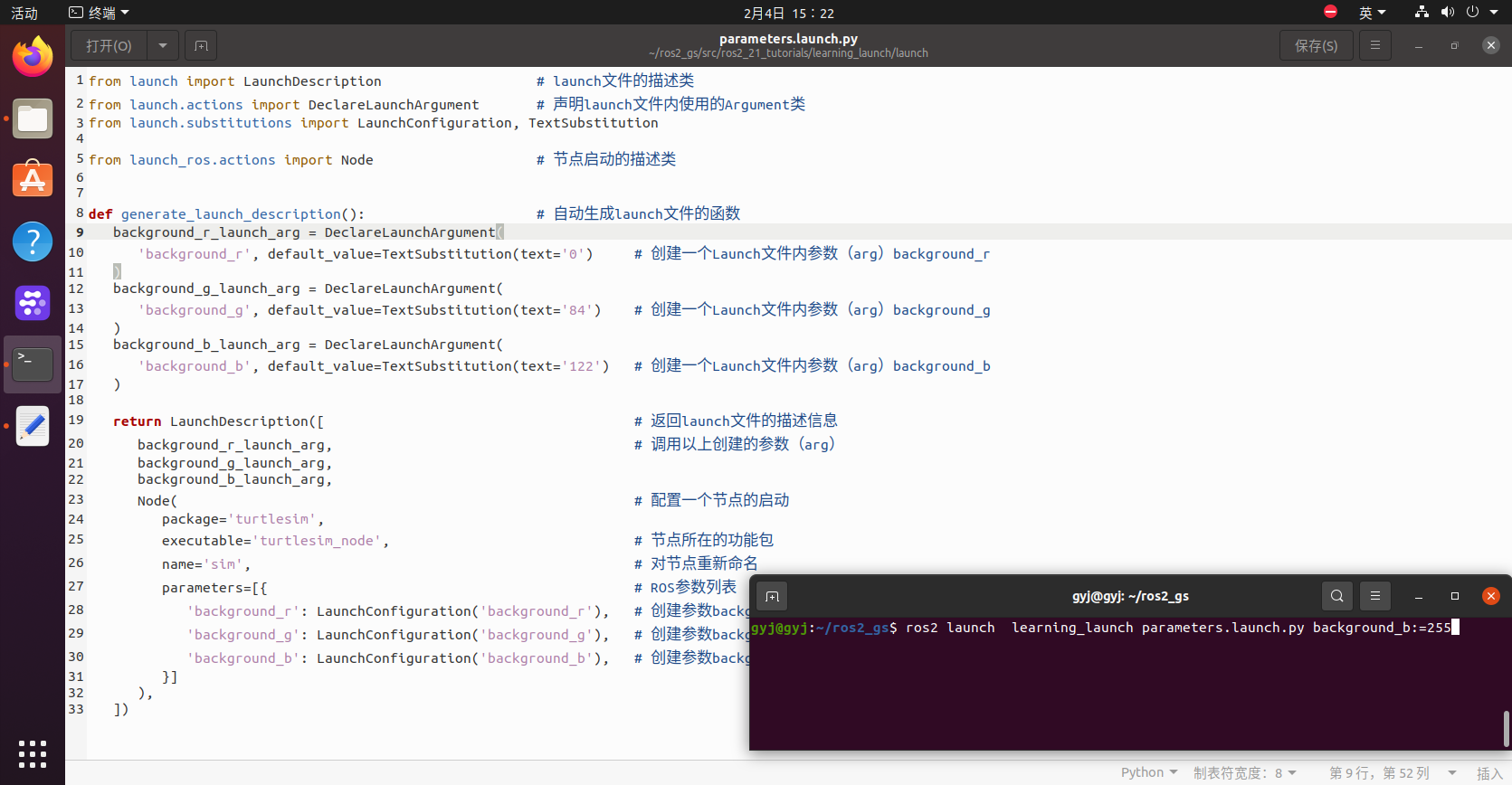
命令行传参
1 | $ ros2 launch learning_launch parameters.launch.py correct_factor_vx_arg:=0.777 |
示例

执行文件(c++)
foxy中如下:
1 | float correct_factor_vx_ = 1.0; |
humble如下:
1 | float correct_factor_vx_ = this->declare_parameter("correct_factor_vx", 1.0); |
- 标题: ros2使用launch动态传参
- 作者: Camill
- 创建于 : 2024-02-04 15:08:00
- 更新于 : 2024-02-23 19:00:00
- 链接: https://camill.love/note/ros2-launch/
- 版权声明: 本文章采用 CC BY-NC-SA 4.0 进行许可。
评论